
お問い合わせ
欲しいものを探す
産業自動化の景観は、重要な変革を遂げています。従来、工場のロボットは安全ケージに閉じ込められ、反復的な組み立てタスクや重労働を行っていました。今日、製造業におけるサービスロボットとして知られる新しいカテゴリーが出現し、運用の継続性に不可欠な非生産タスクを処理するようになっています。
これらの自律システムは、周囲の環境を管理することによって人間の労働力をサポートするように設計されています。産業用ロボットが製品に焦点を当てるのに対し、サービスロボットは施設に焦点を当てます。このシフトにより、製造業者は、内部物流、施設検査、床のメンテナンスなどの領域をターゲットにして、組み立てラインを超えたワークフローを最適化することができます。

サービスロボットは、産業用自動化アプリケーションを除いて、人間または機器のために有用なタスクを実行する半自律型または完全自律型のデバイスです。製造の文脈では、従業員と共有のワークスペースで動作します。従来のCNCマシンやロボットアームとは異なり、これらのユニットは移動可能でコンテキストに対応しています。
これらのロボットは、動的な環境を知覚する能力によって分類されます。彼らは高度なナビゲーションを使用して、人間の介入なしに混雑した廊下を移動します。この能力は、フォークリフト、パレット、および人員が常に動いている工場で不可欠です。
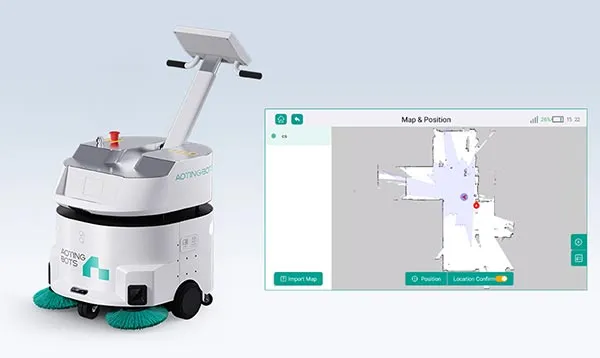
製造業におけるサービスロボットの効果は、彼らの「脳」と「感覚」に依存しています。現代のユニットは、LiDAR(光検出と測距)と視覚センサーを利用して周囲をマッピングします。この過程はSLAM(同時位置特定とマッピング)として知られており、ロボットはリアルタイムで自分の位置を理解することができます。
Aotingbotでは、高い信頼性を確保するために、マルチセンサーフュージョンをプラットフォームに統合しています。例えば、 SW 55-A自律型清掃ロボット レーザーSLAMと3 D深度カメラを組み合わせて使用します。これにより、ロボットは従来のセンサーが見逃す可能性のある低プロファイルの障害物や透明なガラスのパーティションを検出できます。
これらの技術により、ロボットは廊下が塞がれている場合に即座に経路を再計算することができます。このレベルの知能こそが、現代のサービスロボットを古い自動誘導車両(AGV)と区別するものです。AGVには磁気ストリップまたはワイヤーが必要ですが、私たちのサービスロボットはデジタルマップを使用して自由に移動します。

サービスロボットは、さまざまな運用上のボトルネックに対処する多目的なツールです。製造業者が手動の施設管理のコストを認識するにつれて、その役割は拡大しています。二次的なタスクを自動化することで、工場は熟練労働者を高付加価値の生産役割にリダイレクトすることができます。
イントラロジスティクスと物質輸送: フォークリフトの交通量を減らすためにワークステーション間で原材料や完成品を移動します。
施設のメンテナンスと衛生: 大きな床面積が清潔で、スリップや機器の損傷を引き起こす可能性のあるゴミがないことを確認してください。
安全とセキュリティパトロール: オフ時間中に漏れや不正アクセスを検出するために、サーマルカメラとガスセンサーを利用します。
環境モニタリング: 敏感な電子機器や医薬品製造ゾーンの温度、湿度、空気の質を追跡します。
清潔な床を維持することは、見た目だけでなく、基本的な安全性とコンプライアンスの要件でもあります。ほこり、油のこぼれ、金属の削りくずは、精密機械の完全性を損なう可能性があります。大規模な施設での手動清掃は、しばしば一貫性がなく、労働集約的です。
私たちは、これらの特定の産業上の課題に対処するためにSW 55-Aを設計しました。これは、床の洗浄過程全体を自動化する専門のサービスロボットです。単に掃除するだけでなく、水の補充やバッテリーの充電のためにワークステーションに戻ることで、自己のライフサイクルを管理します。
人通りの多い製造環境では、一貫した衛生管理が製品の交差汚染を防止します。自律型スクラバーを導入することで、施設は給与コストを増やすことなく24時間365日の清潔さを確保できます。これは、環境管理が厳格に監査されるISO認定工場にとって特に重要です。
製造ワークフローにサービスロボットを統合することで、組織の健康状態が測定可能に改善されます。最も直接的な影響は、退屈で汚い、または危険なタスクに対する人間の露出の減少です。これにより、従業員の定着率が高くなり、職場の負傷率が低下します。
さらに、これらのロボットは、手動プロセスでは提供できないデータ駆動型の洞察を提供します。ロボットは、正確に何平方メートルが清掃されたか、または何キロメートルの材料が移動されたかを報告できます。この透明性により、工場マネージャーは現実世界の使用パターンに基づいてスケジュールを最適化することができます。
効率は一貫性によっても得られます。サービスロボットは疲労を経験せず、シフト終了時と開始時と同じレベルのパフォーマンスを維持します。この予測可能性は、「リーン製造」の原則の基盤であり、可変性は生産性の敵です。
これらのロボットの次のフロンティアは、「産業用インターネット・オブ・シングス」(IIoT)とのより深い統合に関わります。私たちは、サービスロボットが工場管理システム(MES)と直接通信するようになることを予想しています。例えば、天井カメラで検出されたこぼれは、自動的に清掃ロボットを現場に派遣することができます。
人工知能は、予知保全においても大きな役割を果たします。設定されたスケジュールに従う代わりに、ロボットはセンサーを使用して工場のどの領域に注意を払う必要があるかを特定します。反応的なサービスからプロアクティブなサービスへの移行により、ダウンタイムをさらに最小限に抑えることができます。
これらの高度なシステムの製造業者として、私たちは人間と機械の相互作用を洗練し続けています。目標は、サービスロボットが工場の「背景」を処理する滑らかな環境を作り出すことです。これにより、製造の人間要素が完全に革新と品質管理に焦点を当てることができます。

AMRとサービスロボットの違いは何ですか?
AMR(自律移動ロボット)は特定の技術の一種であり、「サービスロボット」は機能的なカテゴリーです。製造業の多くのサービスロボットは、フロアマーカーなしでナビゲーションするためにAMR技術を使用しています。
混雑した工場でサービスロボットを使用することは安全ですか?
はい、現代のサービスロボットには、緊急停止ボタン、LiDAR、超音波センサーなどの冗長な安全システムが装備されています。私たちは、人間がすぐに安全ゾーンに入ると、ロボットを減速または即座に停止するように設計しています。
不均等な産業フロアでサービスロボットは操作できますか?
ほとんどのサービスロボットは、屋内の平らな産業用表面用に設計されています。しかし、高品質のモデルは、現代の倉庫や製造工場で一般的に見られる小さな勾配や小さな伸縮ジョイントを扱うことができます。
工場でサービスロボットを展開するのにどのくらい時間がかかりますか?
単一のユニットのマッピングと初期設定は、しばしば数時間で完了することがあります。ロボットは施設内を走行して環境のデジタルツインを作成し、その後すぐに自律的な操作を開始できます。
これらのロボットは常時インターネット接続が必要ですか?
多くのロボットは、ローカルマップを使用して主要なタスクをオフラインで実行できますが、リモートモニタリング、フリート管理、ソフトウェアアップデートの受信には通常、接続が必要です。
国際ロボット連盟-サービスロボットの定義
https://ifr.org/service-robots
IEEE Spectrum-ロボティクスとオートメーションのニュースとトレンド
https://spectrum.ieee.org/robotics
ISO 134 82: 2014-サービスロボットの安全要件
https://www.iso.org/standard/53820.html
ロボット工学と労働者の安全に関するOSHAガイドライン
https://www.osha.gov/robotics
産業自動化の景観は、重要な変革を遂げています。従来、工場のロボットは安全ケージに閉じ込められ、反復的な組み立てタスクや重労働を行っていました。今日、製造業におけるサービスロボットとして知られる新しいカテゴリーが出現し、運用の継続性に不可欠な非生産タスクを処理するようになっています。
これらの自律システムは、周囲の環境を管理することによって人間の労働力をサポートするように設計されています。産業用ロボットが製品に焦点を当てるのに対し、サービスロボットは施設に焦点を当てます。このシフトにより、製造業者は、内部物流、施設検査、床のメンテナンスなどの領域をターゲットにして、組み立てラインを超えたワークフローを最適化することができます。
サービスロボットは、産業用自動化アプリケーションを除いて、人間または機器のために有用なタスクを実行する半自律型または完全自律型のデバイスです。製造の文脈では、従業員と共有のワークスペースで動作します。従来のCNCマシンやロボットアームとは異なり、これらのユニットは移動可能でコンテキストに対応しています。
これらのロボットは、動的な環境を知覚する能力によって分類されます。彼らは高度なナビゲーションを使用して、人間の介入なしに混雑した廊下を移動します。この能力は、フォークリフト、パレット、および人員が常に動いている工場で不可欠です。
製造業におけるサービスロボットの効果は、彼らの「脳」と「感覚」に依存しています。現代のユニットは、LiDAR(光検出と測距)と視覚センサーを利用して周囲をマッピングします。この過程はSLAM(同時位置特定とマッピング)として知られており、ロボットはリアルタイムで自分の位置を理解することができます。
Aotingbotでは、高い信頼性を確保するために、マルチセンサーフュージョンをプラットフォームに統合しています。例えば、 SW 55-A自律型清掃ロボット レーザーSLAMと3 D深度カメラを組み合わせて使用します。これにより、ロボットは従来のセンサーが見逃す可能性のある低プロファイルの障害物や透明なガラスのパーティションを検出できます。
これらの技術により、ロボットは廊下が塞がれている場合に即座に経路を再計算することができます。このレベルの知能こそが、現代のサービスロボットを古い自動誘導車両(AGV)と区別するものです。AGVには磁気ストリップまたはワイヤーが必要ですが、私たちのサービスロボットはデジタルマップを使用して自由に移動します。
サービスロボットは、さまざまな運用上のボトルネックに対処する多目的なツールです。製造業者が手動の施設管理のコストを認識するにつれて、その役割は拡大しています。二次的なタスクを自動化することで、工場は熟練労働者を高付加価値の生産役割にリダイレクトすることができます。
イントラロジスティクスと物質輸送: フォークリフトの交通量を減らすためにワークステーション間で原材料や完成品を移動します。
施設のメンテナンスと衛生: 大きな床面積が清潔で、スリップや機器の損傷を引き起こす可能性のあるゴミがないことを確認してください。
安全とセキュリティパトロール: オフ時間中に漏れや不正アクセスを検出するために、サーマルカメラとガスセンサーを利用します。
環境モニタリング: 敏感な電子機器や医薬品製造ゾーンの温度、湿度、空気の質を追跡します。
清潔な床を維持することは、見た目だけでなく、基本的な安全性とコンプライアンスの要件でもあります。ほこり、油のこぼれ、金属の削りくずは、精密機械の完全性を損なう可能性があります。大規模な施設での手動清掃は、しばしば一貫性がなく、労働集約的です。
私たちは、これらの特定の産業上の課題に対処するためにSW 55-Aを設計しました。これは、床の洗浄過程全体を自動化する専門のサービスロボットです。単に掃除するだけでなく、水の補充やバッテリーの充電のためにワークステーションに戻ることで、自己のライフサイクルを管理します。
人通りの多い製造環境では、一貫した衛生管理が製品の交差汚染を防止します。自律型スクラバーを導入することで、施設は給与コストを増やすことなく24時間365日の清潔さを確保できます。これは、環境管理が厳格に監査されるISO認定工場にとって特に重要です。
製造ワークフローにサービスロボットを統合することで、組織の健康状態が測定可能に改善されます。最も直接的な影響は、退屈で汚い、または危険なタスクに対する人間の露出の減少です。これにより、従業員の定着率が高くなり、職場の負傷率が低下します。
さらに、これらのロボットは、手動プロセスでは提供できないデータ駆動型の洞察を提供します。ロボットは、正確に何平方メートルが清掃されたか、または何キロメートルの材料が移動されたかを報告できます。この透明性により、工場マネージャーは現実世界の使用パターンに基づいてスケジュールを最適化することができます。
効率は一貫性によっても得られます。サービスロボットは疲労を経験せず、シフト終了時と開始時と同じレベルのパフォーマンスを維持します。この予測可能性は、「リーン製造」の原則の基盤であり、可変性は生産性の敵です。
これらのロボットの次のフロンティアは、「産業用インターネット・オブ・シングス」(IIoT)とのより深い統合に関わります。私たちは、サービスロボットが工場管理システム(MES)と直接通信するようになることを予想しています。例えば、天井カメラで検出されたこぼれは、自動的に清掃ロボットを現場に派遣することができます。
人工知能は、予知保全においても大きな役割を果たします。設定されたスケジュールに従う代わりに、ロボットはセンサーを使用して工場のどの領域に注意を払う必要があるかを特定します。反応的なサービスからプロアクティブなサービスへの移行により、ダウンタイムをさらに最小限に抑えることができます。
これらの高度なシステムの製造業者として、私たちは人間と機械の相互作用を洗練し続けています。目標は、サービスロボットが工場の「背景」を処理する滑らかな環境を作り出すことです。これにより、製造の人間要素が完全に革新と品質管理に焦点を当てることができます。
AMRとサービスロボットの違いは何ですか?
AMR(自律移動ロボット)は特定の技術の一種であり、「サービスロボット」は機能的なカテゴリーです。製造業の多くのサービスロボットは、フロアマーカーなしでナビゲーションするためにAMR技術を使用しています。
混雑した工場でサービスロボットを使用することは安全ですか?
はい、現代のサービスロボットには、緊急停止ボタン、LiDAR、超音波センサーなどの冗長な安全システムが装備されています。私たちは、人間がすぐに安全ゾーンに入ると、ロボットを減速または即座に停止するように設計しています。
不均等な産業フロアでサービスロボットは操作できますか?
ほとんどのサービスロボットは、屋内の平らな産業用表面用に設計されています。しかし、高品質のモデルは、現代の倉庫や製造工場で一般的に見られる小さな勾配や小さな伸縮ジョイントを扱うことができます。
工場でサービスロボットを展開するのにどのくらい時間がかかりますか?
単一のユニットのマッピングと初期設定は、しばしば数時間で完了することがあります。ロボットは施設内を走行して環境のデジタルツインを作成し、その後すぐに自律的な操作を開始できます。
これらのロボットは常時インターネット接続が必要ですか?
多くのロボットは、ローカルマップを使用して主要なタスクをオフラインで実行できますが、リモートモニタリング、フリート管理、ソフトウェアアップデートの受信には通常、接続が必要です。
国際ロボット連盟-サービスロボットの定義
https://ifr.org/service-robots
IEEE Spectrum-ロボティクスとオートメーションのニュースとトレンド
https://spectrum.ieee.org/robotics
ISO 134 82: 2014-サービスロボットの安全要件
https://www.iso.org/standard/53820.html
ロボット工学と労働者の安全に関するOSHAガイドライン
https://www.osha.gov/robotics
お問い合わせ


